An open source customizable mission control GUI application, base station transceiver hardware, and vehicle transceiver computer hardware package. Independently created for the Prometheus v1.0.0 Bi-propellant rocket engine research project. This project was undertaken by the UCF student organization S.E.D.S (Students for Exploration and Development of Space). The base station hardware consists of a RFM69 radio module, a Teensy4.0, and a 3D printed case with an RGB status LED. The vehicle side hardware consists of the same except for the Teensy version being a 4.1 allowing for onboard SD card black box logging. Based on an improved version of my "ESP32 MicroBot Web Control" software.

A 3D printed boat independently created to compete in the UCF freshman engineering "Great Navel Orange Boat Race" competition. Equipped with a steering servo, brushed DC motor, jet thruster, GPS, magnetometer, and Texas Instruments MSP430 microcontroller board it is capable of autonomously following a path of GPS waypoints defined using Google Earth.

An ESP32 based robot. The body and chassis are both 3D printed with the body being made from silvery metallic filament to achieve the cyber truck aesthetic. The robot car is equipped with a 9dof IMU, mecanum wheels, and encoders on each of the four independent drive motors. This allows for skid steer and vector simulated Ackerman steering. Additionally there are 5 ultrasonic sonars, a front facing 1.3 MP camera, a quad core Arm processor, and a dual core GPU. This allows for autonomous navigation with obstacle avoidance and lane line detection. Based upon the "ESP32 MicroBot" platform for use with the "ESP32 MicroBot Web Control" driverstation.

An attachable mask for flute that redirects breath downwards without disrupting the laminar flow across the mouth piece. Custom designed for the Olympic Heights Mighty Lions Marching band.

An ESP32 based robot development platform created for the Dirty Mechanics FRC Robotics team as a substitute for large robots during covid quarantine.
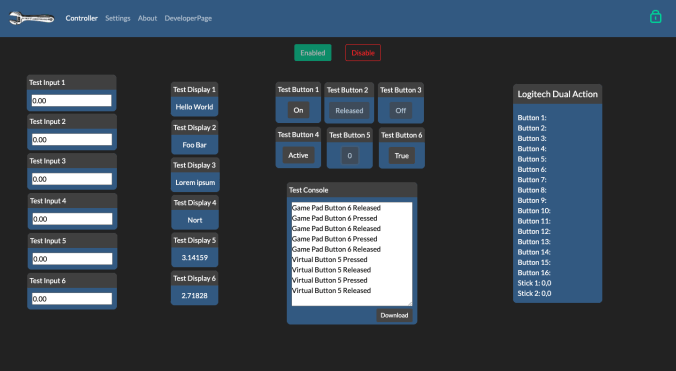
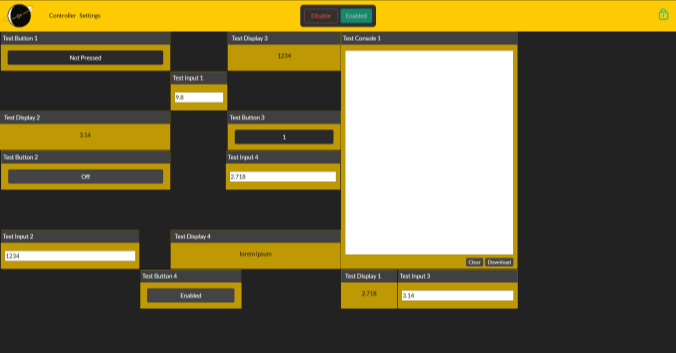
Browser-based driver station and smart dashboard telemetry software for ESP32-based robots. Allows for easy creation of widget UI elements for teaching robotics and programming. Created for Dirty Mechanics FRC Robotics team during covid quarantine. Also developed to provide a more technical and affordable robotics education solution for schools.

A modular multipurpose Apache K8S cluster of Raspberry Pi's I designed and 3D printed. The rack has automatic climate control and a status display via ESP8266. This webpage was originally hosted on this server.

A 3D printed quadrupedal spider-legged robot running Python3 on a Raspberry Pi Zero W with an internal inverse kinematic model.

A 3D printed assembly containing the Seed Studio Maix dock, its screen, and the compatible stereo camera. Written in MicroPython and using OpenCV object detection, it allows for testing with stereo CV.

A 3D printed and CNC'd aluminum camera assembly using a PS3 Eye cam and six 3.7-watt LEDs to perform object detection and pose estimation of retro reflective FRC robotics targets. Runs on a Raspberry Pi 4 with an FRCVision software base. Custom made for team 3932 Dirty Mechanics.

3D printed assembly with a Raspberry Pi Zero and an infrared Pi camera module.
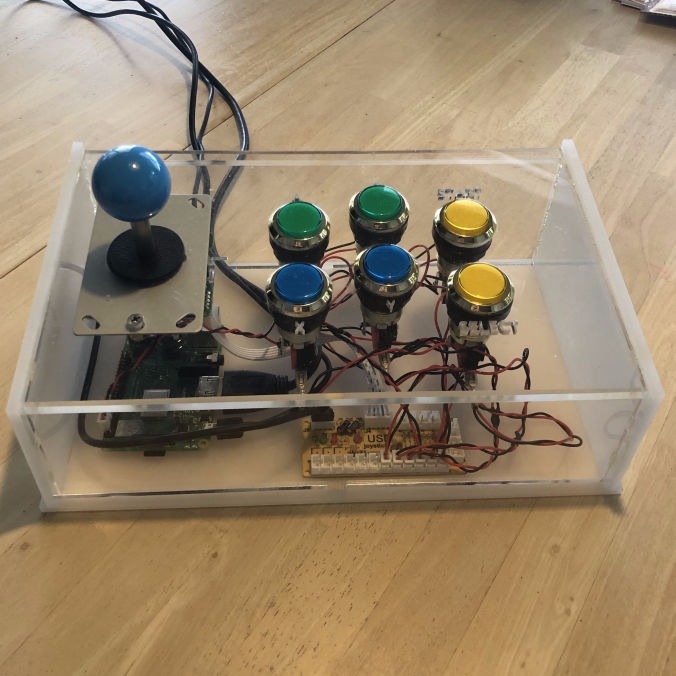
DIY bootleg Xbox Kinect software using OpenCV2 and a Pi Cam for controlling a Raspberry Pi-powered RetroPi emulation arcade console. The console is made from laser-cut acrylic.

